



Step Down 10 Click
R1,300.00 ex. VAT
Step Down 10 Click is a compact add-on board that converts higher voltages into a lower voltage level. This board features the TPSM63610, a high-density synchronous buck DC/DC power module with enhanced HotRodTM from Texas Instruments. It is a highly integrated DC/DC solution that combines power MOSFETs, a shielded inductor, and passives. It uses voltages from 3V up to 36V as an input voltage to step it down from 2V up to 20V as an adjustable output with up to 8A of current. This Click board™ makes the perfect solution for the development of test and measurement devices, factory automation and control, buck and inverting buck-boost power supplies, and more.
Step Down 10 Click is fully compatible with the mikroBUS™ socket and can be used on any host system supporting the mikroBUS™ standard. It comes with the mikroSDK open-source libraries, offering unparalleled flexibility for evaluation and customization. What sets this Click board™ apart is the groundbreaking ClickID feature, enabling your host system to seamlessly and automatically detect and identify this add-on board.
Stock: Lead-time applicable.
| 5+ | R1,235.00 |
| 10+ | R1,170.00 |
| 15+ | R1,105.00 |
| 20+ | R1,063.40 |
How does it work?
Step Down 10 Click is based on the TPSM63610, a high-density synchronous buck DC/DC power module with enhanced HotRodTM from Texas Instruments. The TPSM63610 features up to 95% efficiency, ultra-low conducted and radiated EMI signatures, several protection mechanisms, and more. The feedback input of the TPSM63610 that sets the desired voltage output regulation consists of a voltage divider, of which one part is the MCP4661T, a dual digital POT with non-volatile memory from Microchip. The MCP4661T is a 100K potentiometer in 8-bit resolution, 256 wiper steps, and can store values in internal EEPROM. The TPSM63610 also has an adjustable frequency in a range of 2.2MHz up to 400kHz, which can be selected over the onboard digital potentiometer or can be set as a fixed value over the unpopulated R12 resistor. The values are in the table of the attached Step Down 10 Click schematic.

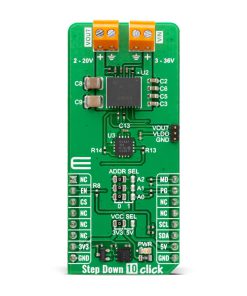
There are two screw terminals for connecting input and output voltages. The Step Down 10 Click features an additional 3-pin header. This header allows you to improve efficiency by connecting the VLDO as an input bias voltage to the VOUT as an output voltage. You can also improve noise immunity by connecting the VLDO to GND with a 0.1 μF to 1 μF capacitor. If the output voltage is above the 12V, connect VLDO to GND.
Step Down 10 Click uses a standard 2-Wire I2C interface of the MCP4661T to allow the host MCU to set the output voltage, supporting clock frequencies up to 3.4MHz. The I2C address can be selected over the ADDR SEL jumper (0 set by default). If the output voltage is not within the specified window threshold, the power-good PG pin will be asserted. Over the MD pin, you can set the mode of operation for this module. You can choose between auto mode, forced pulse width modulation, and synchronization with an external clock, in this case, set over the digital potentiometer (or resistor). The EN pin is a precision enable input to the regulator.
This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.
Specifications
Type
Buck
Applications
Can be used for the development of test and measurement devices, factory automation and control, buck and inverting buck-boost power supplies, and more
On-board modules
TPSM63610 – high-density synchronous buck DC/DC power module with enhanced HotRod™ from Texas Instruments
Key Features
Versatile synchronous buck module, wide input voltage range, wide output voltage range, ultra-high efficiency across full load range, ultra-low conducted and radiated EMI signatures, power good indicator, overcurrent and thermal shutdown protections, and more
Interface
I2C
Feature
ClickID
Compatibility
mikroBUS™
Click board size
L (57.15 x 25.4 mm)
Input Voltage
3.3V or 5V,External
Pinout diagram
This table shows how the pinout on Step Down 10 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | MD | Mode Selection | |
| Enable Input | EN | 2 | RST | INT | 15 | PG | Power Good Indicator |
| ID COMM | CS | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| JP1 | VCC SEL | Left | Power/Logic Voltage Level Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2-JP4 | ADDR SEL | Left | I2C Address Selection 0/1: Left position 0, Right position 1 |
Step Down 10 Click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | – | 5 | V |
| External Power Supply Voltage VIN | 3 | – | 36 | V |
| Programmable Output Voltage VOUT | 2 | – | 20 | V |
| Rated Output Current | – | – | 8 | A |
Software Support
We provide a library for the Step Down 10 Click as well as a demo application (example), developed using MIKROE compilers. The demo can run on all the main MIKROE development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for Step Down 10 Click driver.
Key functions
-
stepdown10_get_pg_stateStep Down 10 get PG pin state function. -
stepdown10_set_wiper_posStep Down 10 set wiper position. -
stepdown10_set_outputStep Down 10 set output voltage.
Example Description
This library contains API for the Step Down 10 Click driver. This driver provides the functions to set the output voltage treshold.
void application_task ( void )
{
for ( uint8_t n_cnt = STEPDOWN10_MIN_OUTPUT; n_cnt <= STEPDOWN10_MAX_OUTPUT; n_cnt++ )
{
stepdown10_set_output( &stepdown10, ( float ) n_cnt );
log_printf( &logger, " Output voltage %d Vrn", ( uint16_t ) n_cnt );
Delay_ms( 2000 );
}
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
- MikroSDK.Board
- MikroSDK.Log
- Click.StepDown10
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all MIKROE compilers.
mikroSDK
This Click board™ is supported with mikroSDK – MIKROE Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Resources
Downloads
| Weight | 20 g |
|---|---|
| Brand | MikroElektronika |