-
×
 BEE Click
1 × R780.00
BEE Click
1 × R780.00 -
×
 ccRF2 Click
1 × R780.00
ccRF2 Click
1 × R780.00
Subtotal: R1,560.00












R255.00 ex. VAT
Magneto 11 Click is a compact add-on board that contains an accurate and reliable magnetic sensing device. This board features the AS5510, a linear hall sensor with 10-bit resolution, and an I2C interface from ams AG. It can measure the absolute position of lateral movement of a simple 2-pole magnet. A lateral stroke of 0.5mm ~ 2mm can be measured with air gaps around 1.0mm, depending on the magnet size. The AS5510 may be switched to a Power-Down state when it is not used to conserve power. This Click board™ is suitable for position sensing applications requiring a small magnetic range where noise is a critical design parameter.
Magneto 11 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Stock: Lead-time applicable.
| 5+ | R242.25 |
| 10+ | R229.50 |
| 15+ | R216.75 |
| 20+ | R208.59 |
Magneto 11 Click as its foundation uses the AS5510, a 10-bit linear position sensor with digital position (interface) output from ams AG. The AS5510 can measure the absolute position of lateral movement in combination with a diametrical two-pole magnet. The sensor needs a simple 2-pole magnet to measure a lateral movement, and the measured distance depends on the magnet geometry. A lateral stroke of 0.5mm ~ 2mm can be measured with air gaps around 1.0mm, depending on the magnet size. With stronger magnets, even higher lateral strokes and air gaps are possible.

The AS5510 comes in a version of a ±50mT full-scale sensing range to deliver the highest reliability and durability in contactless position measurements. By selecting different measurement ranges, it is possible to choose different sensitivity values; the default sensitivity value of the AS5510 is 97.66µT/LSB. It also features a Power-Down mode that helps save energy and maximize run-time in battery-powered applications.
Magneto 11 Click communicates with MCU using the standard I2C 2-Wire interface for switching between four different sensitivity ranges and for simple data transmission to an MCU, supporting Fast Mode Plus operation with a clock frequency up to 1MHz. The absolute position is measured with a resolution of 10 bit = 1024 positions, and it is provided as a digital value on the serial interface. Besides, the AS5510 allows choosing the least significant bit (LSB) of its I2C slave address using the SMD jumper labeled ADDR SEL. The selection can be made by positioning the SMD jumper to an appropriate position marked as 1 or 0.
This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used, as a reference, for further development.
Type
Magnetic
Applications
Can be used for position sensing applications requiring a small magnetic range where noise is a critical design parameter
On-board modules
AS5510 – 10-bit linear position sensor with digital position (interface) output from AMS-AG
Key Features
Low power consumption, highest reliability and durability, high-resolution output, operates with wide magnetic range, programmable sensitivity, and more
Interface
I2C
Feature
No ClickID
Compatibility
mikroBUS™
Click board size
S (28.6 x 25.4 mm)
Input Voltage
3.3V
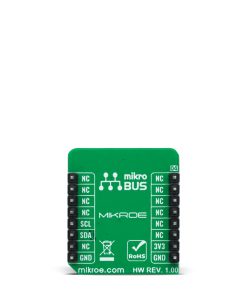
This table shows how the pinout on Magneto 11 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| NC | 2 | RST | INT | 15 | NC | ||
| NC | 3 | CS | RX | 14 | NC | ||
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| JP1 | ADDR SEL | Left | I2C Address Selection 1/0: Left position 1, Right position 0 |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | – | 3.3 | – | V |
| Magnetic Sensing Range | -50 | – | +50 | mT |
| Default Sensitivity | – | 97.66 | – | µT/LSB |
| Resolution | – | 10 | – | bit |
| Operating Temperature Range | -30 | +25 | +85 | °C |
We provide a library for the Magneto 11 Click as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for Magneto 11 Click driver.
Key functions
magneto11_get_magnetic_field This function reads the magnetic field strength in milliTesla.
magneto11_set_sensitivity This function writes specified data to the sensitivity register.
magneto11_set_config This function writes specified data to the config register.
Example Description
This example demonstrates the use of Magneto 11 Click board™ by reading and displaying the magnetic field strength value.
void application_task ( void )
{
float magnetic_field;
if ( MAGNETO11_OK == magneto11_get_magnetic_field ( &magneto11, &magnetic_field ) )
{
log_printf ( &logger, " Magnetic Field: %.3f mT rnn", magnetic_field );
Delay_ms ( 200 );
}
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all MikroElektronika compilers.
This Click board™ is supported with mikroSDK – MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
| Weight | 17 g |
|---|---|
| Brand | MikroElektronika |







