








CXPI Click
R260.00 ex. VAT
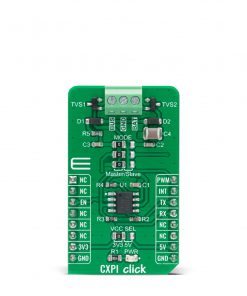
CXPI Click is a compact add-on board that contains a transceiver that supports the next-generation automotive communication protocol. This board features the BD41000AFJ-C, a transceiver for the CXPI (Clock Extension Peripheral Interface) communication from Rohm Semiconductor. It operates from 7V to 18V external power supply, features easy switching between Master or Slave Mode, arbitration function that stops the data output upon detection of BUS data collision, and fail-safe functions that suspend the output data upon detection of under-voltage or temperature abnormality. This Click board™ is suitable for use in body control applications, including steering switch, AC, and instrument panel systems.
CXPI Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Stock: Lead-time applicable.
| 5+ | R247.00 |
| 10+ | R234.00 |
| 15+ | R221.00 |
| 20+ | R212.68 |
How does it work?
CXPI Click is based on the BD41000AFJ-C, a transceiver for the Clock Extension Peripheral Interface (CXPI) communication from Rohm Semiconductor. The BD41000FJ-C is compliant with the CXPI standard established by JSAE (Society of Automotive Engineers of Japan), enabling highly responsive, reliable multiplex communication even in HMI systems, reducing vehicle weight and contributing to greater fuel efficiency. The BD41000AFJ-C operates from 7V to 18V external power supply labeled as BAT, and has several operating modes each controlled by the CS pin of the mikroBUS™, BUS pin, and UART TX pin.

It has built-in Power-OFF, Through, RX Through other than CODEC Mode for power saving control. Power-OFF Mode reduces power consumption by not supplying power to any circuits other than necessary ones for Wake-Up pulse detection (BUS) and Wake-Up input detection (TX). Through Mode does not process Coding/Decoding. It only drives signals from UART TX to BUS and from BUS to UART RX directly. RX Through Mode reverses RX output at each rising edge of BUS. CODEC Mode is the mode of CXPI communication. CS pin of the mikroBUS™ socket labeled as EN should be set high for the chip to enter CODEC Mode.
The BD41000AFJ-C can achieve a quiescent current of 3uA (typ.), ensuring suitability with automotive applications. As a result, the battery load is minimized during non-operation, contributing to higher energy savings. Also, high ESD resistance (±8kV) makes it possible to achieve low-power, high-reliability CXPI communication. Besides, it has built-in fail-safe functions that suspend the output data upon detection of under-voltage or temperature abnormality.
CXPI Click communicates with MCU using the UART interface with a transmission speed range from 5kbps to 20kbps, and commonly used UART RX and TX pins for the data transfer. Also, it has three jumpers that allow the selection of CXPI transmitter mode on the MS pin of the BD41000AFJ-C to its appropriate position marked as Master or Slave. This can be performed by using the SMD jumpers labeled as MODE. Note that all the jumpers must be placed to the same side, or else the Click board™ may become unresponsive.
This Click board™ is designed to be operated with both 3.3V and 5V logic voltage levels that can be selected via VCC SEL jumper. This allows for both 3.3V and 5V capable MCUs to use the UART communication lines properly. However, the Click board™ comes equipped with a library that contains easy to use functions and an example code that can be used as a reference for further development.
Specifications
Type
CXPI
Applications
Can be used in body control applications, including steering switch, AC, and instrument panel systems.
On-board modules
CXPI Click is based on the BD41000AFJ-C, a transceiver for the Clock Extension Peripheral Interface (CXPI) communication from Rohm Semiconductor.
Key Features
CXPI standards qualified, transmission speed range from 5kbps to 20kbps, Master/Slave switching function, power saving function, data arbitration function, built-in UVLO and TDS function, and more.
Interface
PWM,UART
Feature
No ClickID
Compatibility
mikroBUS™
Click board size
M (42.9 x 25.4 mm)
Input Voltage
3.3V or 5V
Pinout diagram
This table shows how the pinout on CXPI Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | PWM | Master Mode: Clock Input | |
| NC | 2 | RST | INT | 15 | INT | Slave Mode: Clock Output | |
| Enable | EN | 3 | CS | RX | 14 | TX | UART TX |
| NC | 4 | SCK | TX | 13 | RX | UART RX | |
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| JP1 | VCC SEL | Left | Power Supply Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2-JP4 | MODE | Left | Master/Slave Mode Selection: Left position Master, Right position Slave |
CXPI Click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VCC | -0.3 | – | 7 | V |
| Supply Voltage BAT | 7 | – | 18 | V |
| Data Rates | 5 | – | 20 | kbps |
| Power Saving Mode Current | – | – | 10 | μA |
| Operating Temperature Range | -40 | – | +125 | °C |
Software Support
We provide a library for the CXPI Click as well as a demo application (example), developed using MIKROE compilers. The demo can run on all the main MIKROE development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on MIKROE github account.
Library Description
This library contains API for CXPI Click driver.
Key functions
-
cxpi_send_commandSend command. -
cxpi_set_pwm_pin_stateSet PWM pin state function. -
cxpi_set_through_modeSet through mode function.
Example Description
This is an example that demonstrates the use of the CXPI Click board™.
void application_task ( void ) {
#ifdef DEMO_APP_RECEIVER
cxpi_process( );
if ( current_rsp_buf > 0 ) {
log_printf( &logger, "%s", current_rsp_buf );
cxpi_clear_current_rsp_buf( );
}
#endif
#ifdef DEMO_APP_TRANSMITER
cxpi_send_command( &cxpi, &demo_message[ 0 ] );
log_printf( &logger, " Sent data : %s", &demo_message[ 0 ] );
log_printf( &logger, "------------------rn" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
#endif
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on MIKROE github account.
Other MIKROE Libraries used in the example:
- MikroSDK.Board
- MikroSDK.Log
- Click.CXPI
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all MIKROE compilers.
mikroSDK
This Click board™ is supported with mikroSDK – MIKROE Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Resources
Downloads
| Weight | 19 g |
|---|---|
| Brand | MikroElektronika |







