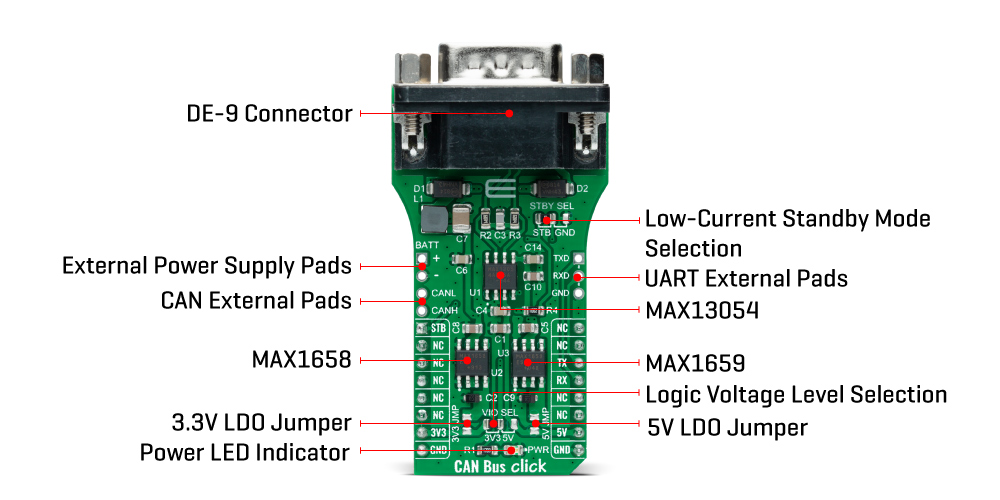
CAN Bus Click is a compact add-on board that provides a link between the CAN protocol controller and the physical wires of the bus lines in a control area network (CAN). This board features the MAX13054, an industry-standard, high-speed CAN transceiver with extended ±80V fault protection from Analog Devices. The CAN transceiver has an input common-mode range greater than ±12V with data rates up to 1Mbps, exceeding the ISO11898 specification of -2V to +7V, and feature ±8kV ESD protection. It also comes with a Standby feature that shuts off the transmitter and switches the receiver to a low-current/low-speed state. This Click board™ is suitable for harsh industrial environments and industrial network applications where overvoltage protection is required.
CAN Bus Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
 BUZZ Click
1 × R115.00
BUZZ Click
1 × R115.00  tRF Click
1 × R1,050.00
tRF Click
1 × R1,050.00  RTC Click
1 × R380.00
RTC Click
1 × R380.00  ccRF2 Click
1 × R775.00
ccRF2 Click
1 × R775.00