












ATA6571 Click
R510.00 ex. VAT
ATA6571 Click is a compact add-on board that contains a transceiver designed for high-speed CAN applications. This board features the ATA6571, a standalone high-speed CAN FD transceiver that interfaces a CAN protocol controller and the physical two-wire CAN bus from Microchip. It offers several operating modes with diagnostic and fail-safe features that enable enhanced system reliability. Its advanced low-power management with local and remote Wake-Up support makes it possible to achieve low current consumption in Standby and Sleep mode. This Click board™ is suitable for all types of high-speed CAN networks, especially in nodes requiring low-power mode with wake-up capability via the CAN bus.
ATA6571 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Stock: Lead-time applicable.
| 5+ | R484.50 |
| 10+ | R459.00 |
| 15+ | R433.50 |
| 20+ | R417.18 |
How does it work?
ATA6571 Click is based on the ATA6571, a standalone high-speed CAN FD transceiver up to 5 Mbit/s that interfaces a Controller Area Network (CAN) protocol controller and the physical two-wire CAN bus from Microchip. It offers improved Electromagnetic Compatibility (EMC) and ESD performance. Its advanced low-power management with local and remote Wake-Up support makes it possible to achieve low current consumption in Standby and Sleep mode, even when the internal I/O and transceiver supplies are switched off. The ATA6571 supports functional safety-related applications. Internal Safety Mechanisms prevent device malfunction due to undervoltage and overtemperature, detect bus dominant and recessive clamping, and prevent blocking of the CAN bus due to permanent dominant or recessive states of RXD and TXD.
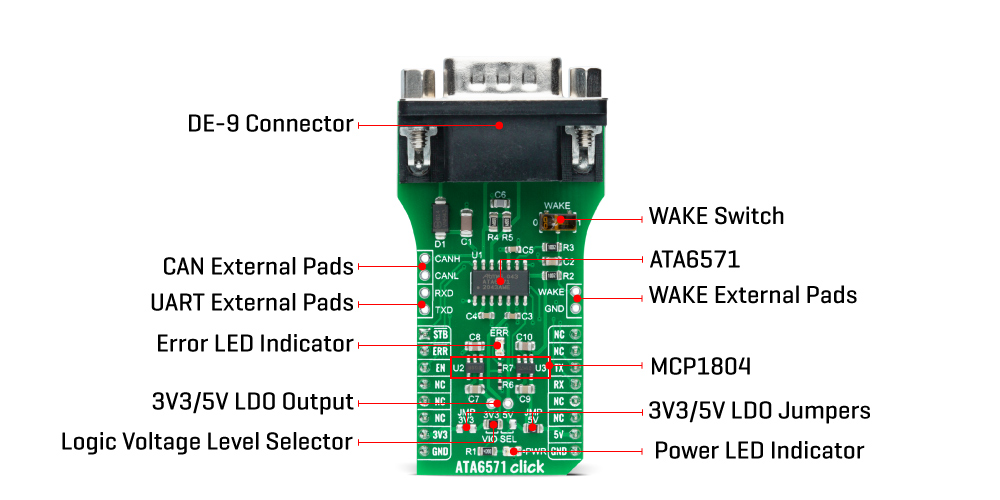
The ATA6571 has one pin used for waking up the device from Sleep mode. This pin is connected to an external switch labeled as WAKE to generate a local Wake-Up function. A Wake-Up event on the CAN bus switches the inhibit output pin INH to the High level. The INH pin provides an internal switch towards the battery supply voltage and control external voltage regulators, the MCP1804 from Microchip. Through SMD jumpers labeled as JMP3V3 and JMP5V, the LDOs output voltages can be used to power up the mikroBUS™ 3.3V and 5V power rails. However, it should be noted that Mikroe does not advise powering up their systems this way. That is why these jumpers are left unpopulated by default.
The ATA6571 communicates with MCU using the UART interface with the default baud rate of 9600 bps for the data transfer. In addition to UART communication pins from the mikroBUS™ socket, the user can connect the TX/RX signals directly through the UART External header on the left edge of the board. This Click board™ comes equipped with the standard DB-9 connector, making interfacing with the CAN bus simple and easy. Besides, the user can connect the CAN signals directly through the CAN External header, also on the left edge of the board.
In addition to these features, the ATA6571 also uses several GPIO pins connected to the mikroBUS™ socket. The EN pin routed on the CS pin of the mikroBUS™ is used for Enable Control. Together with the STB pin routed on the AN pin of the mikroBUS™ socket, which represents Standby Mode Control, the EN pin controls the operating mode of the device. It also provides a pull-down to force the transceiver into Recessive mode if EN is disconnected. Next to these pins, the ATA6571 uses another pin labeled as ERR routed on the RST pin of the mikroBUS™ used as Error Indication. This pin reflects the device status and can be visually displayed using the LED indicator labeled as ERR.
This Click board™ is designed to operate with both 3.3V and 5V logic voltage levels selected via the VIO SEL jumper. It allows for both 3.3V and 5V capable MCUs to use the UART communication lines properly. However, the Click board™ comes equipped with a library that contains easy to use functions and an example code that can be used, as a reference, for further development.
Specifications
Type
CAN,CAN FD
Applications
Can be used for all types of high-speed CAN networks, especially in nodes requiring low-power mode with wake-up capability via the CAN bus.
On-board modules
ATA6571 Click is based on the ATA6571, a standalone high-speed CAN FD transceiver up to 5 Mbit/s that interfaces a Controller Area Network (CAN) protocol controller and the physical two-wire CAN bus from Microchip.
Key Features
High-Speed CAN Transceiver, improved EMC Compatibility and ESD performance, very low power consumption, remote wake-up support, protection and diagnostic functions, and more.
Interface
UART
Feature
No ClickID
Compatibility
mikroBUS™
Click board size
L (57.15 x 25.4 mm)
Input Voltage
3.3V or 5V,External
Pinout diagram
This table shows how the pinout on ATA6571 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Standby Mode Control | STB | 1 | AN | PWM | 16 | NC | |
| Error Indication | ERR | 2 | RST | INT | 15 | NC | |
| Enable Control | EN | 3 | CS | RX | 14 | TX | UART TX |
| NC | 4 | SCK | TX | 13 | RX | UART RX | |
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| LD2 | ERR | – | Error LED Indicator |
| JP1 | VIO SEL | Left | Power Supply Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JMPR1-JMPR2 | JMP3V3-JMP5V | JMP5V Populated | 3V3/5V LDO Jumpers |
| SW1 | WAKE | Down | Wake-Up Switch |
ATA6571 Click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VIO | -0.3 | – | 5.5 | V |
| Battery Supply Voltage | 4.5 | – | 28 | V |
| Communication Data Rates | – | – | 5 | Mbit/s |
| Voltage between CANH and CANL pins | -27 | – | +42 | V |
| Operating Temperature Range | -40 | – | +150 | °C |
Software Support
We provide a library for the ATA6571 Click on our LibStock page, as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Library Description
The library covers all the necessary functions to control ATA6571 Click board™. Library performs a standard UART interface communication.
Key functions:
void ata6571_set_operation_mode ( uint8_t op_mode )– Set device operation mode function.void ata6571_write_byte ( uint8_t input )– Write Single Byte.uint8_t ata6571_read_byte( void )– Read Single Byte.
Examples description
The application is composed of three sections :
- System Initialization – Initializes UART used for communcation and another UART bus used for data logging.
- Application Initialization – Initializes UART driver. In addition to this module is palced inside normal working mode cappable of tranmission and reception of data.
- Application Task – (code snippet) – This is an example which demonstrates the use of ATA6571 Click board™. Tranismiter/Receiver task depend on uncommented code Receiver logging each received byte to the UART for data logging, while transmiter send message each 2 seconds.
void application_task ( )
{
char tmp;
uint8_t drdy_flag;
if ( app_mode == APP_MODE_RECEIVER )
{
// RECEIVER - UART polling
drdy_flag = ata6571_byte_ready( );
if ( 1 == drdy_flag )
{
tmp = ata6571_read_byte( );
mikrobus_logWrite( &tmp, _LOG_BYTE );
}
}
else
{
// TRANSMITER - TX each 2 sec
for ( tmp = 0; tmp < 9; tmp++ )
{
ata6571_write_byte( demo_message_data[ tmp ] );
Delay_ms( 100 );
}
mikrobus_logWrite( " MESSAGE SENT! ", _LOG_LINE );
mikrobus_logWrite( "-------------------", _LOG_LINE );
Delay_ms( 2000 );
}
}
The full application code, and ready to use projects can be found on our LibStock page.
Other mikroE Libraries used in the example:
- UART
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 click or RS232 click to connect to your PC, for development systems with no UART to USB interface available on the board. The terminal available in all MikroElektronika compilers, or any other terminal application of your choice, can be used to read the message.
mikroSDK
This Click board™ is supported with mikroSDK – MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Resources
Downloads
| Weight | 27 g |
|---|---|
| Brand | MikroElektronika |







