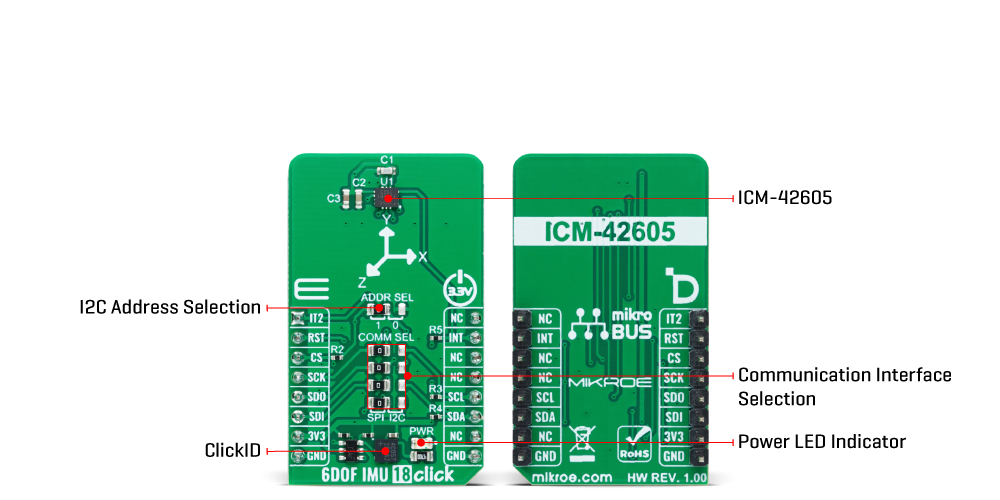
6DOF IMU 18 Click is a compact add-on board with a 6-axis inertial measurement unit. This board features the ICM-42605, a high-performance 6-axis MotionTracking™ IMU from TDK InvenSense. It combines a 3-axis gyroscope and a 3-axis accelerometer featuring a 2Kb-byte FIFO that can lower the traffic on the serial bus interface (SPI or I2C). It reduces power consumption by allowing the system processor to burst read sensor data and then go into a low-power mode. Thanks to the industry-leading feature, APEX Motion Processing engine, this Click board™ represents an excellent choice for applications like tilt sensing, navigation, orientation measurement, platform stabilization, robotics, and many more.
6DOF IMU 18 Click is fully compatible with the mikroBUS™ socket and can be used on any host system supporting the mikroBUS™ standard. It comes with the mikroSDK open-source libraries, offering unparalleled flexibility for evaluation and customization. What sets this Click board™ apart is the groundbreaking ClickID feature, enabling your host system to seamlessly and automatically detect and identify this add-on board.
 HYDROGEN Click
2 × R320.00
HYDROGEN Click
2 × R320.00  MPU 9DOF Click
1 × R525.00
MPU 9DOF Click
1 × R525.00  BEE Click
2 × R765.00
BEE Click
2 × R765.00  Accel Click
1 × R340.00
Accel Click
1 × R340.00  GSM-GPS Click
1 × R1,300.00
GSM-GPS Click
1 × R1,300.00