












Buck 22 Click
R400.00 ex. VAT
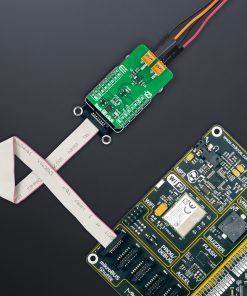
Buck 22 Click is a compact add-on board that steps down the voltage from its input (supply) to its output (load). This board features the TPS62869, a high-frequency synchronous step-down converter with an I2C interface from Texas Instruments, providing an efficient, adaptive, and high power-density solution. The TPS62869 operates in PWM mode at medium to heavy loads (also for the slightest output voltage ripple), and it automatically enters Power-Save Mode operation at light load to maintain high efficiency over the entire output load current range. With its DCS-Control™ architecture, excellent load transient performance and tight output voltage accuracy are achieved alongside adjustable output voltage range from 0.8V to 3.35V with a 10mV step size. This Click board™ is used to derive the required lower voltage from a higher voltage source for FPGAs, ASICs, video chipsets, solid-state drives, and many more.
Buck 22 Click is fully compatible with the mikroBUS™ socket and can be used on any host system supporting the mikroBUS™ standard. It comes with the mikroSDK open-source libraries, offering unparalleled flexibility for evaluation and customization. What sets this Click board™ apart is the groundbreaking ClickID feature, enabling your host system to seamlessly and automatically detect and identify this add-on board.
Stock: Lead-time applicable.
| 5+ | R380.00 |
| 10+ | R360.00 |
| 15+ | R340.00 |
| 20+ | R327.20 |
How does it work?
Buck 22 Click is based on the TPS62869, a synchronous step-down converter with an I2C interface from Texas Instruments. The TPS62869 base its work on the DCS-Control™ topology and operates in PWM (pulse width modulation) mode for medium to heavy load conditions and Power Save Mode at light load currents. In PWM mode, the converter operates with its nominal switching frequency of 2.4MHz, having a controlled frequency variation over the input voltage range from the VIN terminal from 2.4 up to 5.5V. Because DCS-Control™ supports both operation modes (PWM and PFM selectable through a serial interface) within a single building block, the transition from PWM mode to Power Save Mode is seamless and without effects on the output voltage, providing an efficient, adaptive, and high power-density solution.

With its DCS-Control™ architecture, excellent load transient performance and tight output voltage accuracy are achieved alongside adjustable output voltage and current ranges from 0.8V to 3.35V and up to 6A on the VOUT terminal with a 10mV step size. As the load current decreases, the TPS62869 enters Power Save Mode operation, which occurs when the inductor current becomes discontinuous, reaching 0A during a switching cycle. In Power Save Mode, the output voltage rises slightly above the nominal output voltage.
This Click board™ communicates with MCU using the standard I2C 2-Wire interface to read data and configure settings, supporting a Fast Mode operation up to 400kHz. Besides, it also possesses the power-good function, routed to the red LED marked as PWR and INT pin of the mikroBUS™ socket, indicating that the output reached regulation.
This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
Specifications
Type
Buck
Applications
Can be used to derive the required input voltage from a higher voltage source for FPGAs, ASICs, video chipsets, solid-state drives, and more
On-board modules
TPS62869 – synchronous step-down converter with an I2C interface from Texas Instruments
Key Features
DCS-Control topology for fast transient response, adjustable output voltage, 1% output voltage accuracy, 2.4MHz switching frequency, I2C interface, Power-Save Mode, Power-Good indicator, and more
Interface
I2C
Feature
ClickID
Compatibility
mikroBUS™
Click board size
M (42.9 x 25.4 mm)
Input Voltage
3.3V or 5V,External
Pinout diagram
This table shows how the pinout on Buck 22 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| NC | 2 | RST | INT | 15 | PGD | Power-Good Indicator | |
| ID COMM | CS | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
Onboard settings and indicators
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| LD2 | PWR | – | Power-Good LED Indicator |
| JP1 | VCC SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
Buck 22 Click electrical specifications
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | – | 3.3 | – | V |
| External Power Supply VIN | 2.4 | – | 5.5 | V |
| Output Voltage VOUT | 0.8 | – | 3.35 | V |
| Output Current | 0 | – | 6 | A |
Software Support
We provide a library for the Buck 22 Click as well as a demo application (example), developed using Mikroe compilers. The demo can run on all the main Mikroe development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for Buck 22 Click driver.
Key functions
-
buck22_set_voutThis function sets the output voltage by using I2C serial interface. -
buck22_read_voutThis function reads the output voltage by using I2C serial interface. -
buck22_get_pg_pinThis function returns the power good (PG) pin logic state.
Example Description
This example demonstrates the use of Buck 22 Click board™ by changing the output voltage.
void application_task ( void )
{
if ( !buck22_get_pg_pin ( &buck22 ) )
{
log_info ( &logger, " Device is shut down. " );
while ( !buck22_get_pg_pin ( &buck22 ) );
log_info ( &logger, " Device is powered up. " );
}
static uint16_t vout_mv = BUCK22_VOUT_MIN;
if ( BUCK22_OK == buck22_set_vout ( &buck22, vout_mv ) )
{
if ( BUCK22_OK == buck22_read_vout ( &buck22, &vout_mv ) )
{
log_printf ( &logger, " Vout: %u mVrn", vout_mv );
}
}
vout_mv += 100;
if ( vout_mv > BUCK22_VOUT_MAX )
{
vout_mv = BUCK22_VOUT_MIN;
}
Delay_ms ( 3000 );
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager (recommended), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
- MikroSDK.Board
- MikroSDK.Log
- Click.Buck22
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all Mikroe compilers.
mikroSDK
This Click board™ is supported with mikroSDK – MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
Resources
Downloads
| Weight | 19 g |
|---|---|
| Brand | MikroElektronika |







