-
×
 EXPAND Click
1 × R250.00
EXPAND Click
1 × R250.00
Subtotal: R250.00












R320.00 ex. VAT
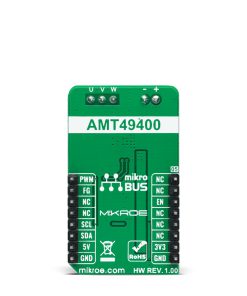
Brushless 21 Click is a compact add-on board suitable for controlling brushless DC (BLDC) motors with any MCU. This board features the AMT49400, an advanced 3-phase, sensorless BLDC motor driver with integrated power MOSFETs from Allegro Microsystems. The AMT49400 is rated for an operating voltage range from 4V to 16V. Motor rotation speed is controlled by applying a duty cycle command to the PWM input, while a simple I2C interface is provided for setting motor-rated voltage, rated current, rated speed, resistance, and startup profiles. Besides, it features additional diagnostic circuits and drive-control functions such as motor lock detection and over-current (short) protection. This Click board™ makes the perfect solution for home appliances such as pumps and cooling fans, industrial equipment, and more.
Brushless 21 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Stock: Lead-time applicable.
| 5+ | R304.00 |
| 10+ | R288.00 |
| 15+ | R272.00 |
| 20+ | R261.76 |
Brushless 21 Click as its foundation uses the AMT49400, a three-phase BLDC controller with integrated MOSFETs from Allegro Microsystems. The integrated field-oriented control (FOC) algorithm achieves the best efficiency and dynamic response and minimizes acoustic noise. Also, Allegro’s proprietary non-reverse startup algorithm improves startup performance. The BLDC motor, connected to the terminals labeled as U, V, and W, will start towards the target direction after power-up without reverse shaking or vibration. The Soft-On Soft-Off (SOSO) feature gradually increases the current to the motor at ON command (windmill condition). It gradually reduces the current from the motor at the OFF command, further reducing the acoustic noise and operating the motor smoothly.

This Click board™ allows interface selection to communicate with MCU. The selection between PWM and I2C interface can be made by positioning SMD jumpers labeled as COMM SEL to an appropriate position. Note that all the jumpers’ positions must be on the same side, or the Click board™ may become unresponsive. While the I2C interface is selected, setting motor-rated voltage, rated current, rated speed, resistance, and startup profiles are allowed via the EEPROM programmability. On the other side, the motor speed is controlled by applying a duty cycle command to the PWM input pin of the AMT49400.
Alongside the PWM pin from the mikroBUS™ socket, this Click board™ also has the Enable pin labeled as EN and routed to the CS pin of the mikroBUS™ socket to optimize power consumption used for power ON/OFF purposes. The FG pin, routed on the INT pin of the mikroBUS™ socket, provides motor speed information to the system, such as motor lock detection. This feature monitors the motor position to determine if the motor is running as expected. If a lock condition is detected, the motor drive will be disabled for 5 seconds before an attempted auto-restart.
This Click board™ can operate with both 3.3V and 5V logic voltage levels selected via the VIO SEL jumper. It allows for both 3.3V and 5V capable MCUs to use the communication lines properly. Additionally, there is a possibility for the AMT49400 power supply selection via jumper labeled as VBB SEL to supply the AMT49400 from an external power supply terminal in the range from 4V to 16V or with 5V from mikroBUS™ power rail. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
Type
Brushless
Applications
Can be used for home appliances such as pumps and cooling fans, industrial equipment, and more
On-board modules
AMT49400 – three-phase BLDC controller with integrated MOSFETs from Allegro Microsystems
Key Features
Coding-free sensorless field-oriented control, quiet and quick startup, PWM/I2C interface, lock detection, optional closed-loop speed control, protection features, and more
Interface
I2C,PWM
Feature
No ClickID
Compatibility
mikroBUS™
Click board size
M (42.9 x 25.4 mm)
Input Voltage
3.3V or 5V,External
This table shows how the pinout on Brushless 21 Click corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | PWM | PWM Signal | |
| Enable | EN | 2 | RST | INT | 15 | FG | Motor Speed Detection |
| NC | 3 | CS | RX | 14 | NC | ||
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | – | Power LED Indicator |
| JP1 | VIO SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2 | VBB SEL | Left | AMT49400 Power Supply Selection VIN/5V: Left position VIN, Right position 5V |
| JP3-JP4 | COMM SEL | Right | Communication Interface Selection I2C/GPIO: Left position I2C, Right position GPIO |
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VIO | 3.3 | – | 5 | V |
| External Supply Voltage VIN | 4 | – | 16 | V |
| Operating Temperature Range | -40 | +25 | +105 | °C |
| Maximum Output Current | – | – | 2 | A |
We provide a library for the Brushless 21 Click as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
Package can be downloaded/installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on Mikroe github account.
Library Description
This library contains API for Brushless 21 Click driver.
Key functions
brushless21_set_duty_cycle This function sets the duty cycle in percentages ( Range[ 0..1 ] ).
brushless21_get_motor_speed This function reads the motor speed in Hz.
brushless21_switch_direction This function switches the motor direction by toggling the DIR bit.
Example Description
This example demonstrates the use of the Brushless 21 Click board™ by driving the motor at different speeds.
void application_task ( void )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float duty = duty_cnt / 10.0;
if ( BRUSHLESS21_OK == brushless21_set_duty_cycle ( &brushless21, duty ) )
{
log_printf( &logger, "rn Duty Cycle : %d%%rn", ( uint16_t )( duty_cnt * 10 ) );
}
if ( BRUSHLESS21_DRV_SEL_I2C == brushless21.drv_sel )
{
int8_t temperature = 0;
float motor_speed = 0;
float vbb_voltage = 0;
if ( BRUSHLESS21_OK == brushless21_get_temperature ( &brushless21, &temperature ) )
{
log_printf( &logger, " Temperature: %d Crn", ( int16_t ) temperature );
}
if ( BRUSHLESS21_OK == brushless21_get_motor_speed ( &brushless21, &motor_speed ) )
{
log_printf( &logger, " Motor Speed: %.2f Hzrn", motor_speed );
}
if ( BRUSHLESS21_OK == brushless21_get_vbb_voltage ( &brushless21, &vbb_voltage ) )
{
log_printf( &logger, " VBB Voltage: %.2f Vrn", vbb_voltage );
}
if ( 0 == duty_cnt )
{
duty_inc = 1;
if ( BRUSHLESS21_OK == brushless21_switch_direction ( &brushless21 ) )
{
log_printf( &logger, " Switch directionrn" );
}
}
}
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
}
duty_cnt += duty_inc;
Delay_ms( 1000 );
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on Mikroe github account.
Other Mikroe Libraries used in the example:
Additional notes and informations
Depending on the development board you are using, you may need USB UART click, USB UART 2 Click or RS232 Click to connect to your PC, for development systems with no UART to USB interface available on the board. UART terminal is available in all MikroElektronika compilers.
This Click board™ is supported with mikroSDK – MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
For more information about mikroSDK, visit the official page.
| Weight | 20 g |
|---|---|
| Brand | MikroElektronika |







